|
|
Technische Details zur Mini-DIN Buchse an Estlcam Hardware:
Alle Daten ohne Gewähr!
Die Mini-DIN Buchse ist ein "Zwitter" mit 2 verschiedenen Betriebsarten:
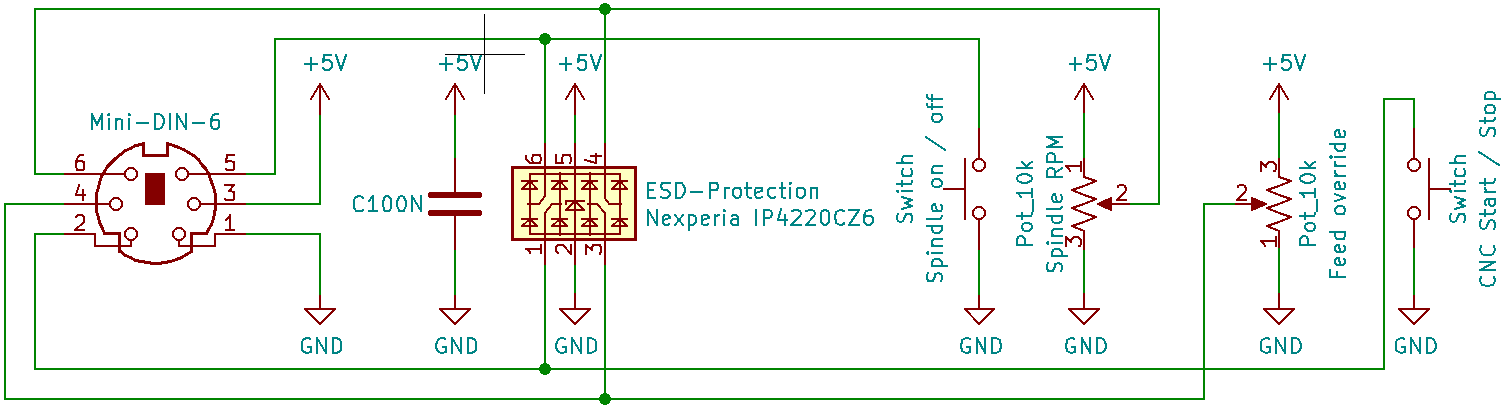
- Betriebsart 1 / Hardware Direktanschluss:
- Je 2 digitale und analoge Eingänge zum direkten Anschluss von Tastern und Potis...
- Wird z.B. vom Bedienpanel genutzt...
- Betriebsart 2 / Serielles Interface:
- I2C Schnittstelle + 2 Encodereingänge...
- Tastendrücke, Poti- und Joystickstellungen werden seriell über I2C übertragen...
- Drehgeber Encodersignale werden über 2 eigene Leitungen direkt an die Steuerung übertragen...
- Wird z.B. vom Handrad genutzt...
Beschreibung Betriebsart 1:
Pinbelegung (und Kabelfarben beim im Shop verfügbaren Mini-DIN Kabel, allerdings ohne Gewähr, da der Hersteller wechseln könnte.)
- Pin 1: GND (rot)
- Pin 2: Taster Programm Start / Stopp (orange)
- Pin 3: +5V (braun)
- Pin 4: Poti Vorschubanpassung (gelb oder blau)
- Pin 5: Taster Fräsmotor Start / Stopp (schwarz)
- Pin 6: Poti Drehzahlanpassung (grün)
Grundsätzlich sind eigene Basteleien mit Tastern, LEDs und Potis möglich, aber:
- Das Bedienpanel und Poti und Taster Modul enthält eine Schutzschaltung (Nexperia IP4220CZ6) um zu verhindern, dass elektrostatische Entladungen zur Steuerung durchschlagen und dort Schaden anrichten können...
- Dieses Teil ist auch im Schaltplan oben eingezeichnet...
- Leider ist es winzig und alles andere als bastlerfreundlich...
- Prinzipiell geht es auch ohne dieses Teil und in der Praxis gibt es nur selten Probleme, ein gewisses Restrisiko bleibt allerdings...
- Wirklich relevant ist jedoch bei Potis mit Metallachse oder Metallkörper nur Potiknöpfe aus Kunststoff zu verwenden - sonst ist die Gefahr durchschlagender Entladungen tatsächlich erheblich...
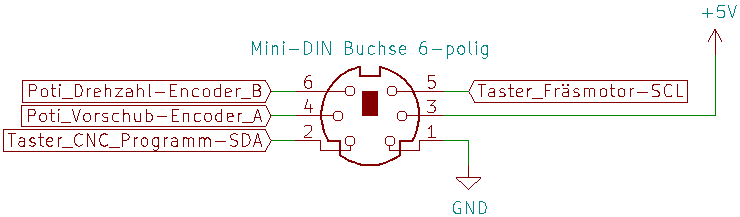
Beschreibung Betriebsart 2:
Pinbelegung:
- Pin 1: GND
- Pin 2: SDA / Serial Data
- Pin 3: +5V
- Pin 4: Encoder A
- Pin 5: SCL / Serial Clock
- Pin 6: Encoder B
TWI / I2C Datentransfer Steuerung Richtung Handrad:
- Jedes Datenframe besteht aus 9 Bytes:
- Byte 1 = Befehl bzw. Modus in den das Handrad gehen soll.
- Byte 2-9 = Daten (Altlast ohne Funktion - einfach einlesen und ignorieren)
- Gültige Befehle für Byte 1 sind:
- 1: Normale Übertragung der Handrad-Daten.
- 3: Aufforderung zur Identifizierung: Das Handrad muss mit "Handrad 0001" antworten - sonst wird es nicht von der Steuerung akzeptiert.
- 4: Challenge: Überbleibsel eines Kopierschutzes. Das Handrad muss mit Hexadezimal "3B59E82AE9B1BED800000000" antworten - sonst wird es zumindest von älteren Estlcam Versionen abgelehnt.
- 5: Seriennummer Atmega328PB: Das Handrad sollte die Seriennummer des Chips übertragen (10 Byte + 2 Bytes "0" zur Vervollständigung des Datenframes), darf allerdings auch mit Fantasiedaten antworten.
- Der Befehl bzw. Modus bleibt aktiv bis ein anderer Befehl kommt. Kommt z.b. der Befehl zur Identifizierung muss das Handrad solange damit antworten bis explizit ein anderer Befehl kommt.
TWI / I2C Datentransfer Handrad Richtung Steuerung:
- Jedes Datenframe besteht aus 15 Bytes:
- Bytes 1-12 = Daten
- Byte 13 = Modus / dieses Byte muss dem aktuellen Modus bzw. ausgeführten Befehl entsprechen.
- Byte 14 = Frame / mit jeder Übertragung muss dieses Byte um 1 hochgezählt werden. Ändert sich dieses Byte nicht mehr geht die Steuerung von einem Problem mit dem Handrad aus, stoppt die Bewegung und versucht einen Reset der Kommunikation.
- Byte 15 = Prüfsumme / Frames deren Prüfsumme inkorrekt ist werden verworfen um keine ungewollten Aktionen auszulösen
Berechnung der Prüfsumme:
- Prüfsumme auf 0 setzen.
- Bytes 1 bis 14 mit Exclusiv Oder verknüfen und nach jedem Byte die Prüfsumme zusätzlich um 1 erhöhen.
- Prüfsumme = 0
- Prüfsumme XOR Byte 1
- Prüfsumme = Prüfsumme +1
- Prüfsumme XOR Byte 2
- Prüfsumme = Prüfsumme +1
- Prüfsumme XOR Byte 3
- Prüfsumme = Prüfsumme +1
- usw...
Datenframe Modus 1:
- Byte 1: 255 (Altlast - muss 255 zurückgeben, sonst ggf. Probleme!)
- Byte 2:
- Bit 0 = Start / Stopp Taste Programmstart (1 = nicht gedrückt / 0 = gedrückt)
- Bit 1 = Start / Stopp Taste Fräsmotor (1 = nicht gedrückt / 0 = gedrückt)
- Bit 2 = 1 (sonst ggf. Probleme!)
- Bit 3 = "OK" Taste (1 = nicht gedrückt / 0 = gedrückt)
- Bit 4 bis 7 = 1 (sonst ggf. Probleme!)
- Byte 3: Low Byte Vorschub Poti
- Byte 4: High Byte Vorschub Poti
- Byte 5: Low Byte Drehzahl Poti
- Byte 6: High Byte Drehzahl Poti
- Byte 7: Low Byte X Joystick
- Byte 8: High Byte X Joystick
- Byte 9: Low Byte Y Joystick
- Byte 10: High Byte Y Joystick
- Byte 11: Low Byte Z Joystick
- Byte 12: High Byte Z Joystick
- Byte 13: 1 (Modus)
- Byte 14: Frame (ständig durchlaufend 0-255)
- Byte 15: Prüfsumme (siehe Berechnung der Prüfsumme)
- Poti und Joystickstellungen sind 16 Bit Unsigned Integer von 0 bis 65535.
Datenframe Modus 3:
- Byte 1-12: "Handrad 0001"
- Byte 13: 3 (Modus)
- Byte 14: Frame (ständig durchlaufend 0-255)
- Byte 15: Prüfsumme (siehe Berechnung der Prüfsumme)
Datenframe Modus 4:
- Byte 1-12: Hexadezimal "3B59E82AE9B1BED800000000"
- Byte 13: 4 (Modus)
- Byte 14: Frame (ständig durchlaufend 0-255)
- Byte 15: Prüfsumme (siehe Berechnung der Prüfsumme)
Datenframe Modus 5:
- Byte 1-10: Seriennummer AVR Chip
- Byte 11-12: Auffüllen mit "0"
- Byte 13: 5 (Modus)
- Byte 14: Frame (ständig durchlaufend 0-255)
- Byte 15: Prüfsumme (siehe Berechnung der Prüfsumme)
|